

















主题赛事
返回
第二十届研电赛“城市具身智能”赛题
发布时间:2025-04-03
来源:中国研究生电子设计竞赛
阅读次数:3083
一、赛题简介
随着智慧城市和人工智能技术的快速发展,城市对具备智能感知、智能决策与自主行动能力的智能体需求日益增加。然而,在真实城市环境中开展大规模的智能体实验面临着成本高昂、安全风险高、实验条件难以精确控制等诸多挑战。为解决这一问题,本竞赛采用了统一的EmbodiedCity虚拟仿真平台(https://embodied-city.fiblab.net/),平台提供高仿真的虚拟城市环境,基于北京市国贸区域的真实道路和建筑布局,结合真实人流和车流数据进行模拟。环境包括多样化的街道、细致还原的办公楼、购物中心、住宅区以及动态车辆和行人。平台支持多模态场景理解、跨模态问答、导航、任务规划、多轮对话和个体行为模拟等多类具身智能任务,参赛团队无需自行搭建仿真环境,即可在安全、经济和高效的条件下进行算法开发和系统验证。
该虚拟仿真平台具备以下特点:
高仿真度:平台模拟真实城市环境,包括复杂的道路网络、多样化的建筑物和动态的交通流量,确保智能体在
接近现实的场景中进行训练和测试。
可扩展性:支持多智能体协同作业,参赛团队可以根据竞赛任务需求,部署和控制多个智能体进行协同操作。
实时交互:提供实时环境感知和反馈机制,智能体能够根据环境变化实时调整策略,完成复杂任务。
参赛团队无需自行搭建仿真环境,组委会将提供完善的虚拟仿真平台和详细的技术文档,帮助参赛队伍快速熟
悉平台使用方法,专注于智能体的环境感知、智能决策和运动控制算法开发。
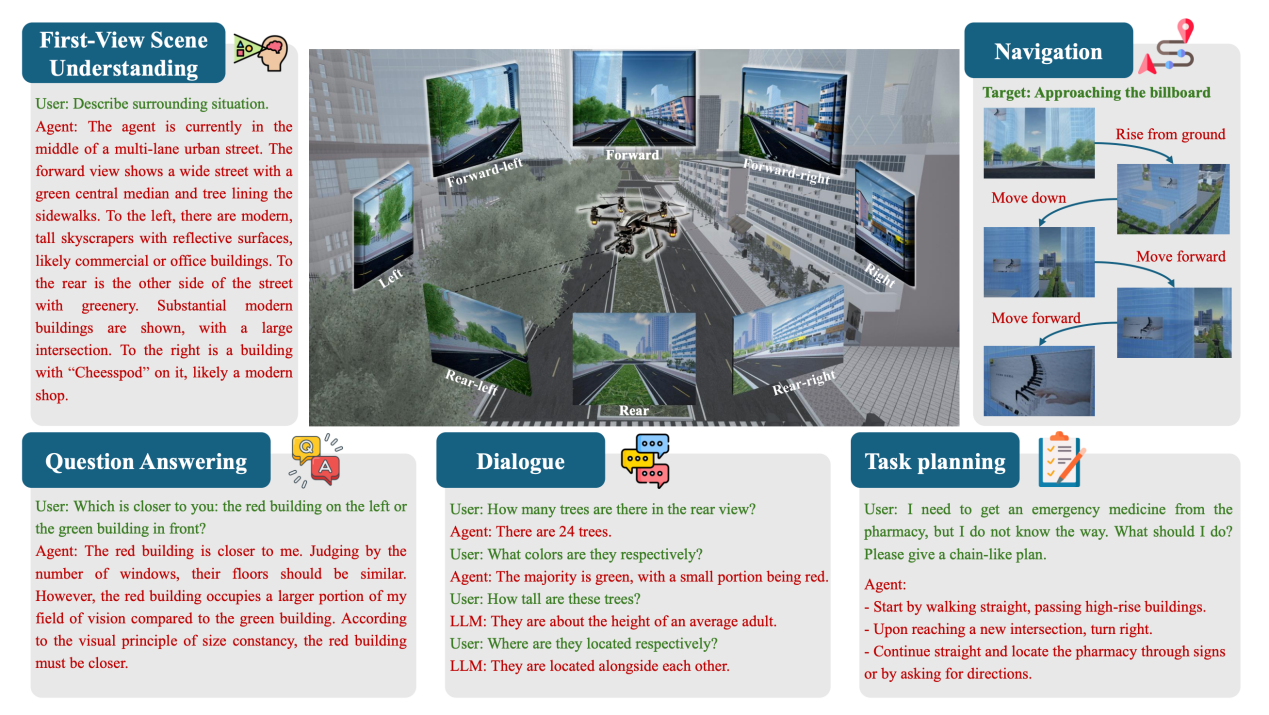
城市具身智能平台EmbodiedCity示意图
二、赛题任务
赛题包括以下三个部分,组委会将提供具体示例和基础代码框架,便于参赛团队快速上手:
(一)离线智能问答任务
参赛团队需完成以下三种任务之一或多种组合:
图像QA任务:给定城市场景图像及相应问题,输出准确的文字答案。
视频QA任务:给定城市场景视频片段及问题,输出准确的文字答案。
3D QA任务:给定虚拟城市三维模型与场景问题,输出准确的文字答案。
(二)实时交互与导航任务
参赛团队需通过智能体实时感知和行动,完成以下任务之一或多种组合:
视觉语言导航(VLN):给定目标地点的自然语言描述和实时环境感知数据,智能体自主输出有效的控制指
令序列,成功到达指定位置。
智能搜索任务:给定目标物或目标地点信息,智能体自主探索环境,规划路径并执行行动,快速有效地实现搜
索目标。
具身智能问答(EQA):给定实时感知环境信息,智能体需实时决策并输出问题的答案。
(三)多智能体实时对抗任务
参赛团队需同时控制多个智能体(如无人机、无人车),在指定虚拟城市区域内进行实时竞争与协作,完成探索、资源抢占、防御和策略对抗等复杂任务。该任务将综合考察团队智能体的协同规划能力、自主决策能力和实时动态调整策略能力。
三、竞赛要求与评审标准
(一)参赛作品要求
功能完整:作品须涵盖感知、决策和控制执行三大功能模块,具备明确的交互界面与操作流程,功能实现稳定可靠。
技术先进:应用先进感知技术(如计算机视觉、深度学习)、智能决策技术(如强化学习、规划优化算法)和高效控制技术。
场景创新:任务场景选择、技术方案和实现方式具备创新性,体现方法的先进性、可行性及潜在社会经济价值。
(二)评审指标与导向
评审指标:任务完成度、感知精度、决策准确性、控制稳定性、创新性与实用性。
导向:鼓励创新技术与方法应用,强调实际城市应用场景下的性能表现和用户体验。
分值设置:离线智能问答任务(满分40分)、实时交互与导航任务(满分40分)、多智能体实时对抗任务
(满分20分)。
(三)输出作品形式
参赛团队需提交以下材料:
(1)技术报告(PDF格式,包含技术方案、算法细节、实验结果与分析)。
(2)演示视频(MP4格式,时长不超过5分钟,展示系统运行效果和主要功能)。
四、奖项
一等奖获奖队伍 1支
二等奖获奖队伍 2支
三等奖获奖队伍 3支
五、技术支持
(一)基本学习资料
(1)Airsim官方文档:https://microsoft.github.io/AirSim/
(2)UE官方目录:https://www.fab.com/zh-cn/sellers/Epic%20Games
(二)平台相关技术资料
(1)城市具身智能平台仓库:https://github.com/tsinghua-fib-lab/EmbodiedCity
(2)城市具身智能平台网页:https://embodied-city.fiblab.net/
(3)相关论文:EmbodiedCity: A Benchmark Platform for Embodied Agent in Real-world City Environment.
(三)EmbodiedCity研电赛比赛交流群
赛事交流QQ群:1041522348
赛事咨询邮箱:embodiedcity@163.com
