参加“揭榜挂帅”专项比赛的参赛团队需从下列比赛项目中任选其一进行参赛。参赛团队在参与“揭榜挂帅”专项组比赛的同时,也可采用“揭榜挂帅”专项组的同一设计作品参评仿真组、部件组、集成组的比赛。
项目一:重型负载协作机械臂安全性设计开发
一、项目背景
项目来源于中科新松有限公司,旨在解决工业场景下人机协作机器人安全性能的瓶颈。当前,在汽车制造、重工业装配等场景中,机器人需在狭小空间内实现50kg级物料的高频次精准搬运,如图1所示。在保障人机协同作业安全的前提下,实现高强度、高频率的工业级操作需求。

图1 重型负载协作机器人概览
机器人的核心性能指标如下(以下指标仅供参考,参赛团队可选用其他品牌型号协作机械臂,性能指标与之相近即可):
关节构型:6自由度串联构型,全关节运动范围±360°。
负载能力:末端动态负载≥50kg(持续作业工况)。
自重限制:整机重量≤100kg(含控制器,自重负载比≤1:2)。
作业效率:最大运动速度≥1.5m/s(空载),标准节拍≤2s(50kg负载工况下完成1m距离抓取-放置循环),关节最大转速≥90°/s(全负载工况)。
精度指标:重复定位精度≤±0.1mm(ISO 9283标准),轨迹跟踪误差<±0.5mm(50kg负载下)。
二、项目要求
1. 碰撞保护:
全关节集成高灵敏度力矩传感器(分辨率≤0.1N·m),碰撞检测响应时间<5ms。
接触力限制≤150N(符合ISO/TS 15066人机协作力标准)。
- 环境适应性:
防护等级IP54(关键关节IP67),工作温度-10℃~50℃。
- 智能化附加要求:
具备基于大模型的任务自动协同与部署能力。
三、企业专家联系方式
企业专家职能:为参赛团队答疑解惑并提供必要的技术支撑。
联系人:陈宏伟
联系电话:18621535846
联系邮箱:chenhongwei@ducorobots.com
项目二:腔镜手术机器人力感知手术器械研制
一、项目背景
项目来源于杭州唯精医疗机器人有限公司,旨在机器人辅助腔镜手术场景下力感知技术缺失的痛点。当前,研制具有灵活性高、力感知精确等特点的手术器械,如图2所示,使医生在手术过程中能感受到器械与患者组织之间的交互作用力,对增强手术操作的安全性,提高腔镜手术的质量和效率具有重要意义。
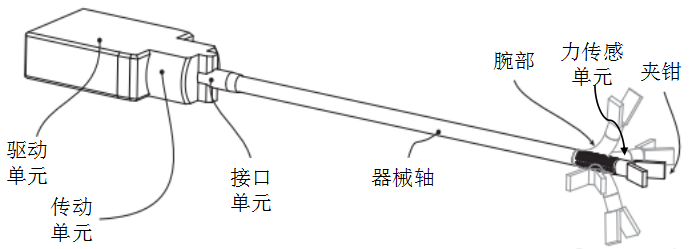
图2 力感知腔镜手术器械组成示意
项目所设计的微型力传感单元要求布置在图2中力传感单元所在位置,鞘套对器械轴的反作用力以及两者之间的摩擦力不会对检测元件的测量结果造成影响。检测元件在此须承受严重的空间约束,整套检测装置需要穿过鞘套进入患者体内,其直径必须控制在10 mm以内。除此之外,须考虑由末端执行器的传动装置(钳爪钢丝)产生的驱动力会对检测装置的测量结果造成影响。
二、项目要求
1. 自由度配置:
力感知腔镜手术器械,须具备横滚、俯仰、偏航和开合4个自由度。
- 交互作用力:
手术器械的微型力传感单元,在x, y, z方向力的测量范围要达到±10 N,测量精度要接近0.1 N。
- 夹持力解耦:
夹持力的测量范围为5 N,须消除驱动器械夹钳作动的钢丝张紧力对三维外作用力正常测量输出的耦合作用。
三、企业专家联系方式
企业专家职能:为参赛团队答疑解惑并提供必要的技术支撑。
联系人:牛国君
联系电话:18506851568
联系邮箱:niuguojun@wisekingrobot.com
项目三:大负载高爆发人形机器人一体化关节
一、项目背景
项目来源于哈尔滨灵动智能装备有限公司,围绕人形机器人在工业救援、化工巡检等高危场景的核心应用需求展开。针对现有技术中,人形机器人关节在大负载工况下动力不足、于恶劣环境中性能显著下降的关键问题,研发适配的高功率密度关节,如图3所示,通过创新结构与材料提升单位体积输出功率和防护性能,使人形机器人在易燃易爆、高湿高尘等环境下稳定执行化工泄漏堵漏检测、矿山塌方破拆搬运高危作业等任务,解决传统关节可靠性难题并提升作业效能。

图3 机器人一体化关节示意
二、项目要求
1、机械结构设计
采用轻量化材料(如钛合金、碳纤维)与紧凑布局,实现高刚性与低惯量平衡;
设计防爆密封结构,解决电机发热与散热矛盾;
集成多轴力/力矩传感器(分辨率≤0.5N?m),支持碰撞检测(响应时间<10ms)。
2、驱动以及控制
选用高性能驱动控制元件,集成多种I/O接口;
开发实时控制算法,支持扭矩/位置模式切换,具备抗干扰滤波与自适应补偿功能。
3、智能化扩展
预留多种传感器的接口(如IMU、温度传感器),支持通讯总线(如CANopen/EtherCAT)与机器人主控通信;
具备故障自诊断功能,可实时上报关节状态(如温度、负载、磨损程度)。
- 特殊环境适配
防水、防尘及防爆等方面的其他要求。具体要求请见表1。
- 核心技术指标
表1 一体化关节的要求与具体指标
|
要求 |
具体指标 |
|
扭矩性能 |
峰值扭矩≥400N?m (持续输出≥30 秒),扭矩重量比≥133 N?m/kg |
|
动态特性 |
最大角速度≥180°/s 位置控制精度≤±0.1° 力矩控制分辨率≤0.5N?m |
|
轻量化设计 |
关节本体重量≤3kg (含驱动器、作动器、传感器等) |
|
可靠性 |
平均无故障时间(MTBF)≥10,000小时,支持振动环境(5-500Hz, 2g加速度) |
|
环境适应性 |
防护等级:IP68 (水下1米持续工作2小时)+IP6X(尘密防护) 防爆认证:Ex d IIC T6 (适用于爆炸性气体环境) 工作温度:-20°C ~ 60°C |
四、企业专家联系方式
企业专家职能:为参赛团队答疑解惑并提供必要的技术支撑。
联系人:李旭
联系电话:15215134605
联系邮箱:ldznzb@126.com